Thanks @cpinter for the kind explanations. I have implemented just this :
double[,] m = reg.TransformationMatrix;
// Translations (in mm)
double[] t = new double[3] {
m[3,0], m[3,1], m[3,2]
};
double RAD2DEG = 180.0 / Math.PI;
double r00 = m[0,0], r01 = m[0,1], r02 = m[0,2];
double r10 = m[1,0], r11 = m[1,1], r12 = m[1,2];
double r20 = m[2,0], r21 = m[2,1], r22 = m[2,2];
// Extract R (row-major)
double[,] R = new double[3,3];
// Copy row 0
R[0, 0] = m[0, 0];
R[0, 1] = m[0, 1];
R[0, 2] = m[0, 2];
// Copy row 1
R[1, 0] = m[1, 0];
R[1, 1] = m[1, 1];
R[1, 2] = m[1, 2];
// Copy row 2
R[2, 0] = m[2, 0];
R[2, 1] = m[2, 1];
R[2, 2] = m[2, 2];
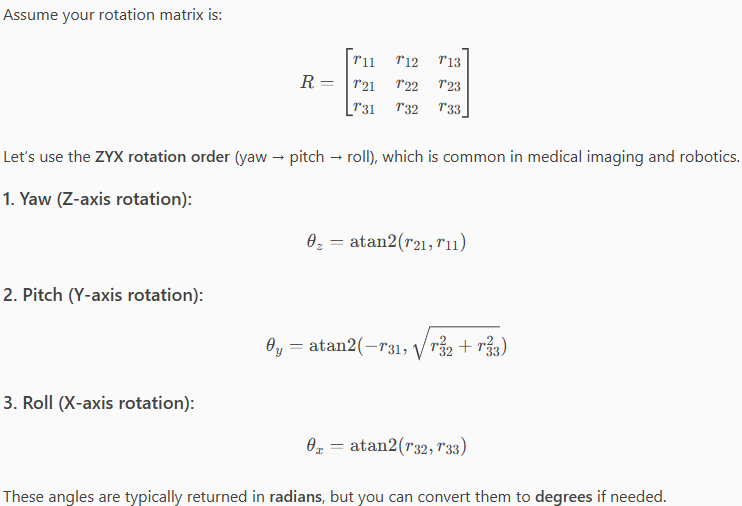
// Intrinsic X-Y-Z (roll, pitch, yaw)
double y_rad = Math.Asin(Math.Max(-1.0, Math.Min(1.0, r02)));
double x_rad = Math.Atan2(-r12, r22);
double z_rad = Math.Atan2(-r01, r00);
double roll = -x_rad * RAD2DEG; // roll
double pitch = -y_rad * RAD2DEG; // pitch
double yaw = -z_rad * RAD2DEG; // yaw
// Get first frame
var cbctframe = cbctvol.Frames.FirstOrDefault();
var ctframe = ctvol.Frames.FirstOrDefault();
//// Extract parameters from the CBCT frame
int cbctxSize = cbctframe.XSize;
int cbctySize = cbctframe.YSize;
int cbctzSize = cbctframe.ZSize;
double cbctxRes = cbctframe.XRes;
double cbctyRes = cbctframe.YRes;
double cbctzRes = cbctframe.ZRes;
VVector cbctorigin = cbctframe.Origin;
VVector cbctxDir = cbctframe.XDirection;
VVector cbctyDir = cbctframe.YDirection;
VVector cbctzDir = cbctframe.ZDirection;
//// Extract parameters from the CT frame
int ctxSize = ctframe.XSize;
int ctySize = ctframe.YSize;
int ctzSize = ctframe.ZSize;
double ctxRes = ctframe.XRes;
double ctyRes = ctframe.YRes;
double ctzRes = ctframe.ZRes;
VVector ctorigin = ctframe.Origin;
VVector ctxDir = ctframe.XDirection;
VVector ctyDir = ctframe.YDirection;
VVector ctzDir = cbctframe.ZDirection;
var ctUserOrigin = ctvol.UserOrigin;
var cbctUserOrigin = cbctvol.UserOrigin;
// Compute center directly from origin and half-extent
VVector cbct_center = cbctorigin
+ (cbctxSize * 0.5 * cbctxRes) * cbctxDir
+ (cbctySize * 0.5 * cbctyRes) * cbctyDir
+ (cbctzSize * 0.5 * cbctzRes) * cbctzDir;
// Compute center directly from origin and half-extent
VVector ct_center = ctorigin
+ (ctxSize * 0.5 * ctxRes) * ctxDir
+ (ctySize * 0.5 * ctyRes) * ctyDir
+ (ctzSize * 0.5 * ctzRes) * ctzDir;
Now the issue is actually recreating those Table shifts (Online Match) values from the screenshots. I am not sure how to recreate this from just the 4x4 matrix shown in slicer.
Thanks a lot for your help